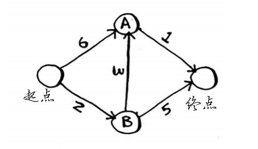
下面来看看如何使用代码来实现狄克斯特拉算法,这里以下面的图为例。
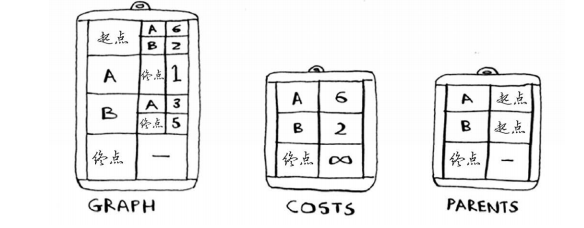
要编写解决这个问题的代码,需要三个散列表。
随着算法的进行,你将不断更新散列表costs和parents。首先,需要实现这个图,为此可像第6章那样使用一个散列表。
graph = {}
在前一章中,你像下面这样将节点的所有邻居都存储在散列表中。
graph["you"] = ["alice", "bob", "claire"]
但这里需要同时存储邻居和前往邻居的开销。例如,起点有两个邻居——A和B。
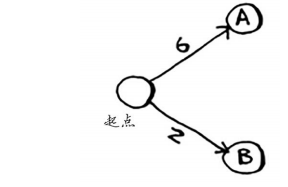
如何表示这些边的权重呢?为何不使用另一个散列表呢?
graph["start"] = {}
graph["start"]["a"] = 6
graph["start"]["b"] = 2
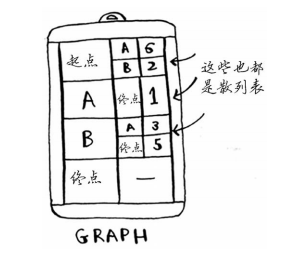
因此graph["start"]是一个散列表。要获取起点的所有邻居,可像下面这样做。
>>> print graph["start"].keys()
["a", "b"]
有一条从起点到A的边,还有一条从起点到B的边。要获悉这些边的权重,该如何办呢?
>>> print graph["start"]["a"]
2
>>> print graph["start"]["b"]
6
下面来添加其他节点及其邻居。
graph["a"] = {}
graph["a"]["fin"] = 1
graph["b"] = {}
graph["b"]["a"] = 3
graph["b"]["fin"] = 5
graph["fin"] = {} #终点没有任何邻居
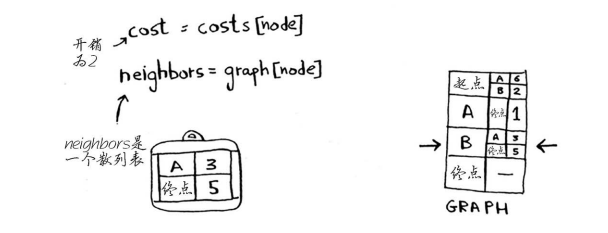
表示整个图的散列表类似于下面这样。
接下来, 需要用一个散列表来存储每个节点的开销。
节点的开销指的是从起点出发前往该节点需要多长时间。你知道的,从起点到节点B需要2分钟,从起点到节点A需要6分钟(但你可能会找到所需时间更短的路径)。你不知道到终点需要多长时间。对于还不知道的开销,你将其设置为无穷大。在Python中能够表示无穷大吗?你可以这样做:

infinity = float("inf")
创建开销表的代码如下:
infinity = float("inf")
costs = {}
costs["a"] = 6
costs["b"] = 2
costs["fin"] = infinity
还需要一个存储父节点的散列表:
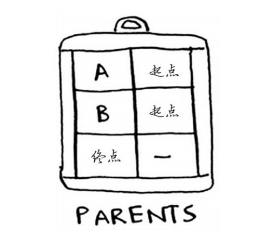
创建这个散列表的代码如下:
parents = {}
parents["a"] = "start"
parents["b"] = "start"
parents["fin"] = None
最后,你需要一个数组,用于记录处理过的节点,因为对于同一个节点,你不用处理多次。
processed = []
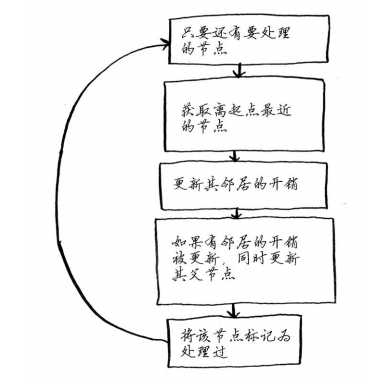
我先列出代码,然后再详细介绍。代码如下。
node = find_lowest_cost_node(costs) #在未处理的节点中找出开销最小的节点
while node is not None: #这个while循环在所有节点都被处理过后结束
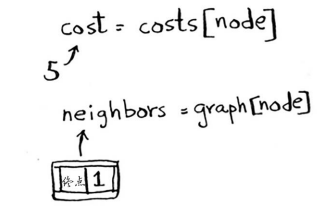
cost = costs[node]
neighbors = graph[node]
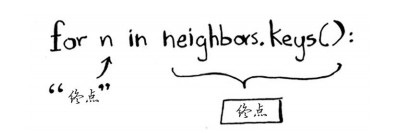
for n in neighbors.keys(): #遍历当前节点的所有邻居
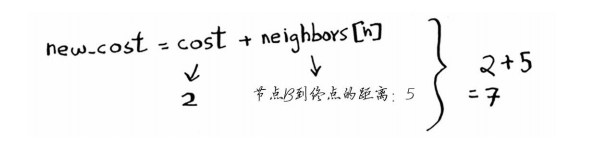
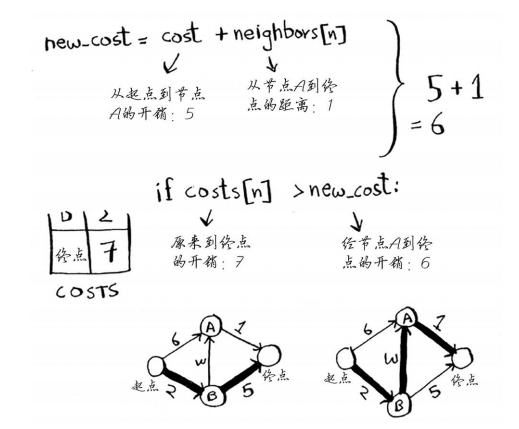
new_cost = cost + neighbors[n]
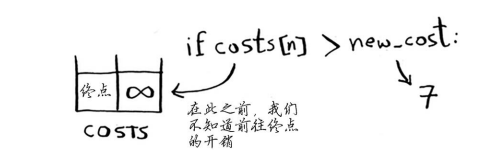
if costs[n] > new_cost: #如果经当前节点前往该邻居更近,
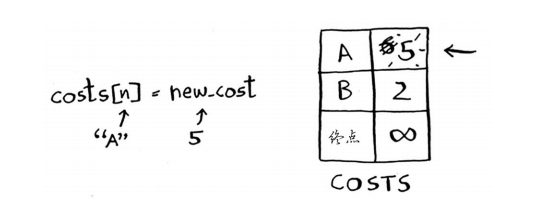
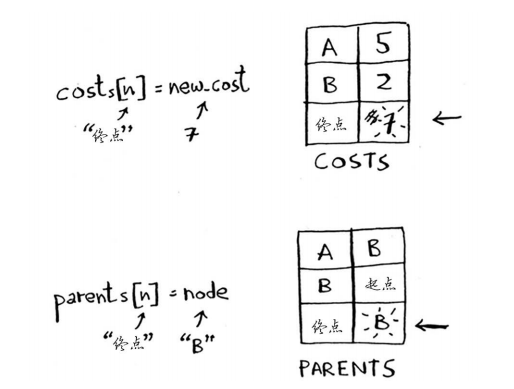
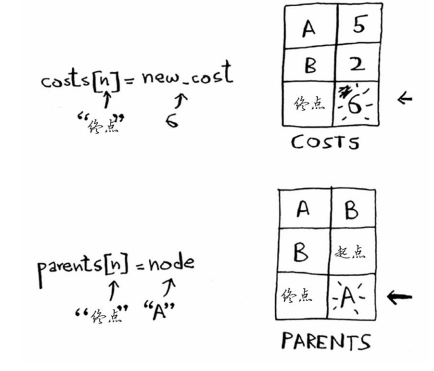
costs[n] = new_cost #就更新该邻居的开销
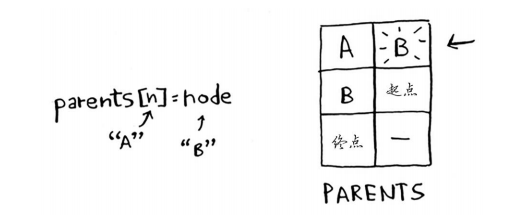
parents[n] = node #同时将该邻居的父节点设置为当前节点
processed.append(node) #将当前节点标记为处理过
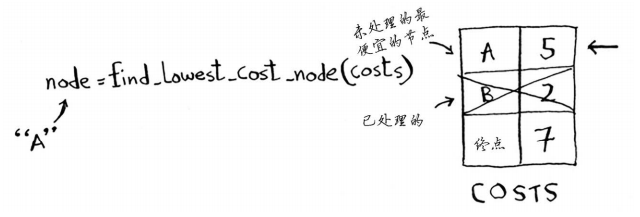
node = find_lowest_cost_node(costs) #找出接下来要处理的节点,并循环
这就是实现狄克斯特拉算法的Python代码!函数find_lowest_cost_node的代码稍后列出,我们先来看看这些代码的执行过程。
找出开销最低的节点。

获取该节点的开销和邻居。
遍历邻居。

每个节点都有开销。开销指的是从起点前往该节点需要多长时间。在这里,你计算从起点出发,经节点B前往节点A(而不是直接前往节点A)需要多长时间。
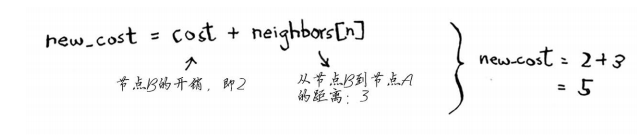
接下来对新旧开销进行比较。
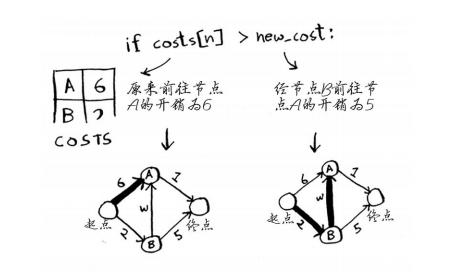
找到了一条前往节点A的更短路径!因此更新节点A的开销。
这条新路径经由节点B,因此节点A的父节点改为节点B。
现在回到了for循环开头。下一个邻居是终点节点。
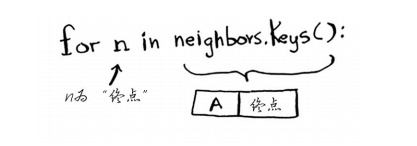
经节点B前往终点需要多长时间呢?
需要7分钟。终点原来的开销为无穷大,比7分钟长。
设置终点节点的开销和父节点。
你更新了节点B的所有邻居的开销。现在,将节点B标记为处理过。

找出接下来要处理的节点。
获取节点A的开销和邻居。
节点A只有一个邻居:终点节点。
当前,前往终点需要7分钟。如果经节点A前往终点,需要多长时间呢?
经节点A前往终点所需的时间更短!因此更新终点的开销和父节点。
处理所有的节点后,这个算法就结束了。希望前面对执行过程的详细介绍让你对这个算法有更深入的认识。函数find_lowest_cost_node找出开销最低的节点,其代码非常简单,如下所示。
def find_lowest_cost_node(costs):
lowest_cost = float("inf")
lowest_cost_node = None
for node in costs: #遍历所有的节点
cost = costs[node]
if cost < lowest_cost and node not in processed: #如果当前节点的开销更低且未处理过,
lowest_cost = cost #就将其视为开销最低的节点
lowest_cost_node = node
return lowest_cost_node
AMY : 书中实现的图和算法极为简易,实际上图是一种复杂的数据结构,实现起来较为复杂,建议有兴趣的朋友看看算法第四版中图的JAVA实现。
给个地址:https://algs4.cs.princeton.edu/home/
偷个懒这里就不标出具体在哪里了。